測定部:24ms周期で測定し、それを平均化した値(風速と方位角)を瞬間風速風向として3秒毎にシリアル出力する。パラウインドのキット(VM10-A、基板と部品)を使用した。ケースは水道用パイプ部品で作成した。TVアンテナ用マストで地上約8メートルに設置した。
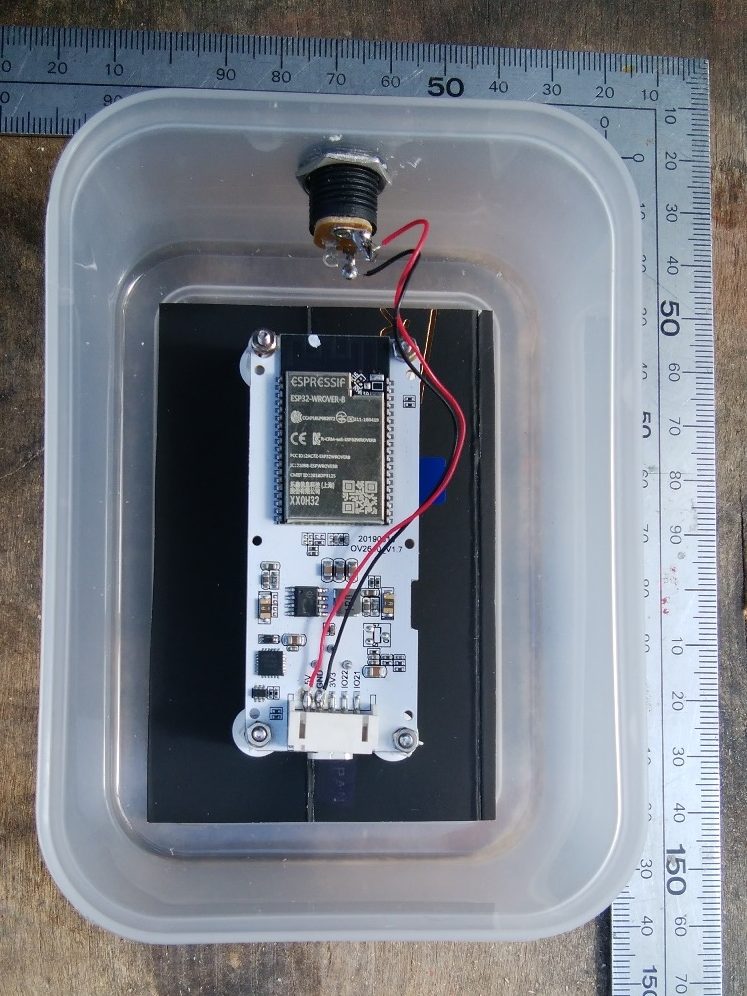
送信部:①測定部から受け取った風速(スカラー値)を2分間平均化して平均風速を算出する。②測定部から受け取った風速と方位角から風速のXY方向成分を計算し、それぞれ2分間平均化する(平均風速の風向を計算するため)。③2分間の瞬間風速の最大値、その時の時刻(インターネットから取得)、方位角を保持する。2分毎に上記①~③のデータと送信時刻(インターネットから取得)をサーバーに送信する。
サーバー:送信部から2分毎に送られるデータをその都度テキストファイルに書き込んで保存する。CRONで10分毎にPythonプログラムを実行し、各種グラフ、表を作成する。それらをWordpressでブログページに表示する。